Свитибот на Skolkovo Robotics, открытие исходных кодов, генератор походки
+374
Всем привет! Спешим поделиться хорошими новостями от проекта Свитибот.

Прежде всего спешим сообщить что Proto2 научилась ходить.
На самом деле ходить она умела еще давно. Некоторые даже могут помнить самое первое видео на нашем ютуб канале, но ходьба ходьбе рознь, то был довольно простой алгоритм.
Теперь у нас есть полноценный генератор походки, который может генерировать разные аллюры — шаг, шаг с перекрытием, рысь и даже галоп (его не проверяли, пока страшно :P).
При этом она может разворачиваться на месте и во время ходьбы, ходить боком, по диагонали и т.д.
Несколько анимаций:

Один из первых запусков окончился неожиданно — Свити упала в обморок! О_о
Блок питания не был готов к таким быстрым движениям, были установлены слишком низкие лимиты срабатывания защиты по току. Ничего страшного, поправили, стала ходить нормально.
Еще по началу у нас были проблемы с болтанкой:
Прото3 смотрит с завистью, она ещё пока не может ходить.
Исправилось заменой движков на более мощные.
Планов еще очень много. Будем дорабатывать.
Да, заголовок выше не врет, мы открываем исходные коды проекта под лицензией BSD.
Теперь вы и сами сможете попробовать поуправлять Свити в режиме симуляции.
Исходные коды вместе с краткой инструкцией по установке находятся тут:
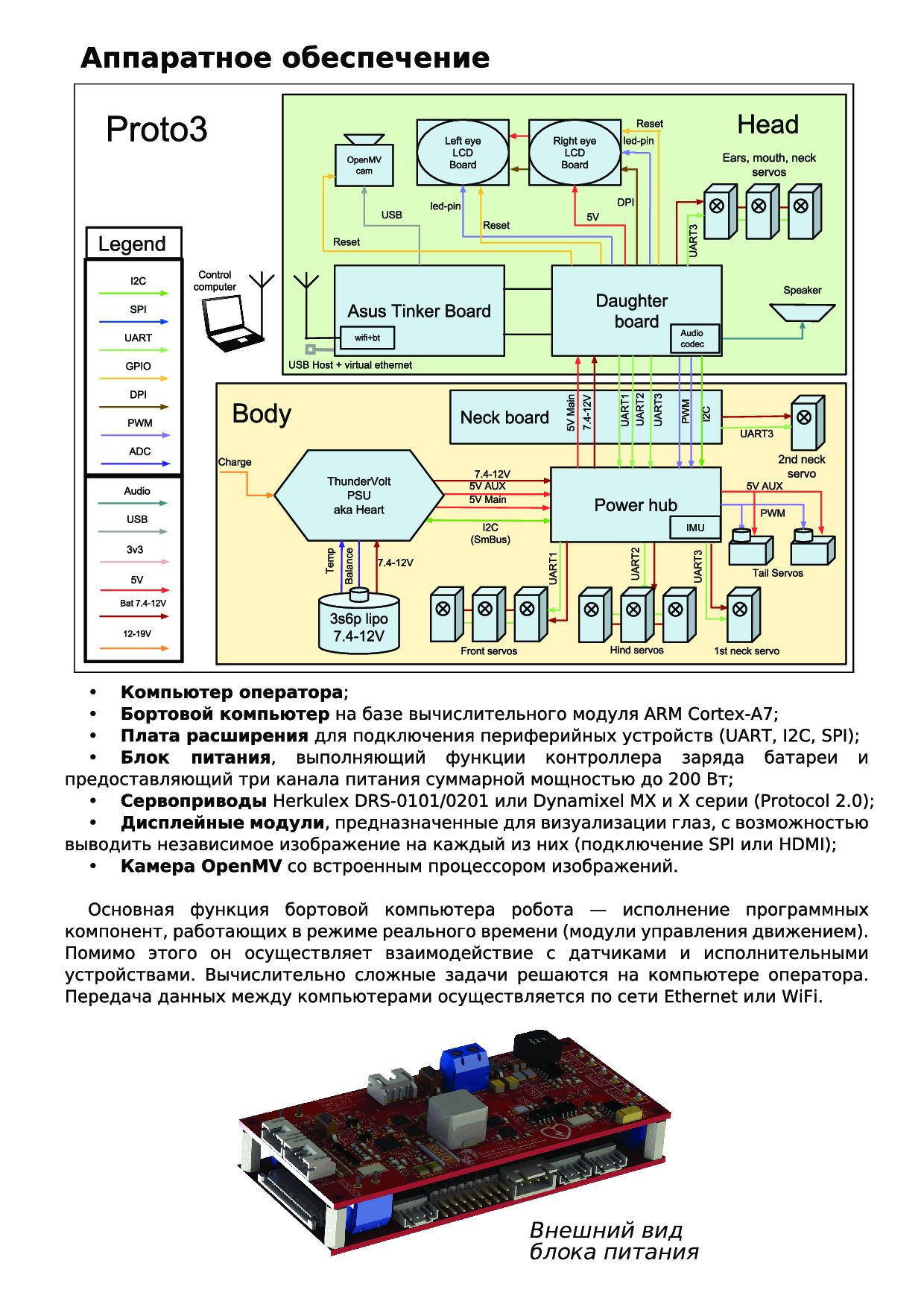
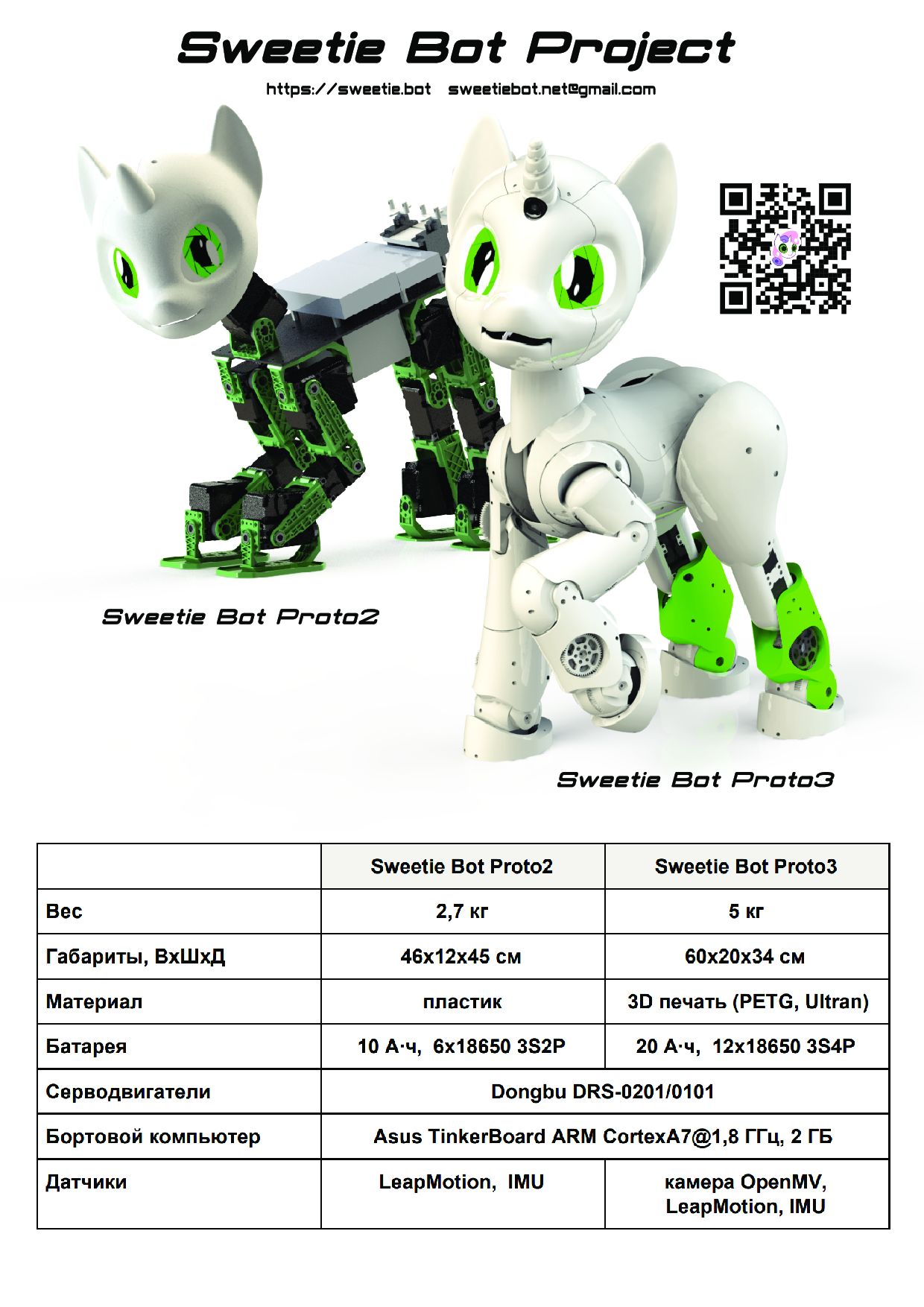
Вчера монтировали стенд.

И дописывали текст для раздаточных материалов.
Спойлер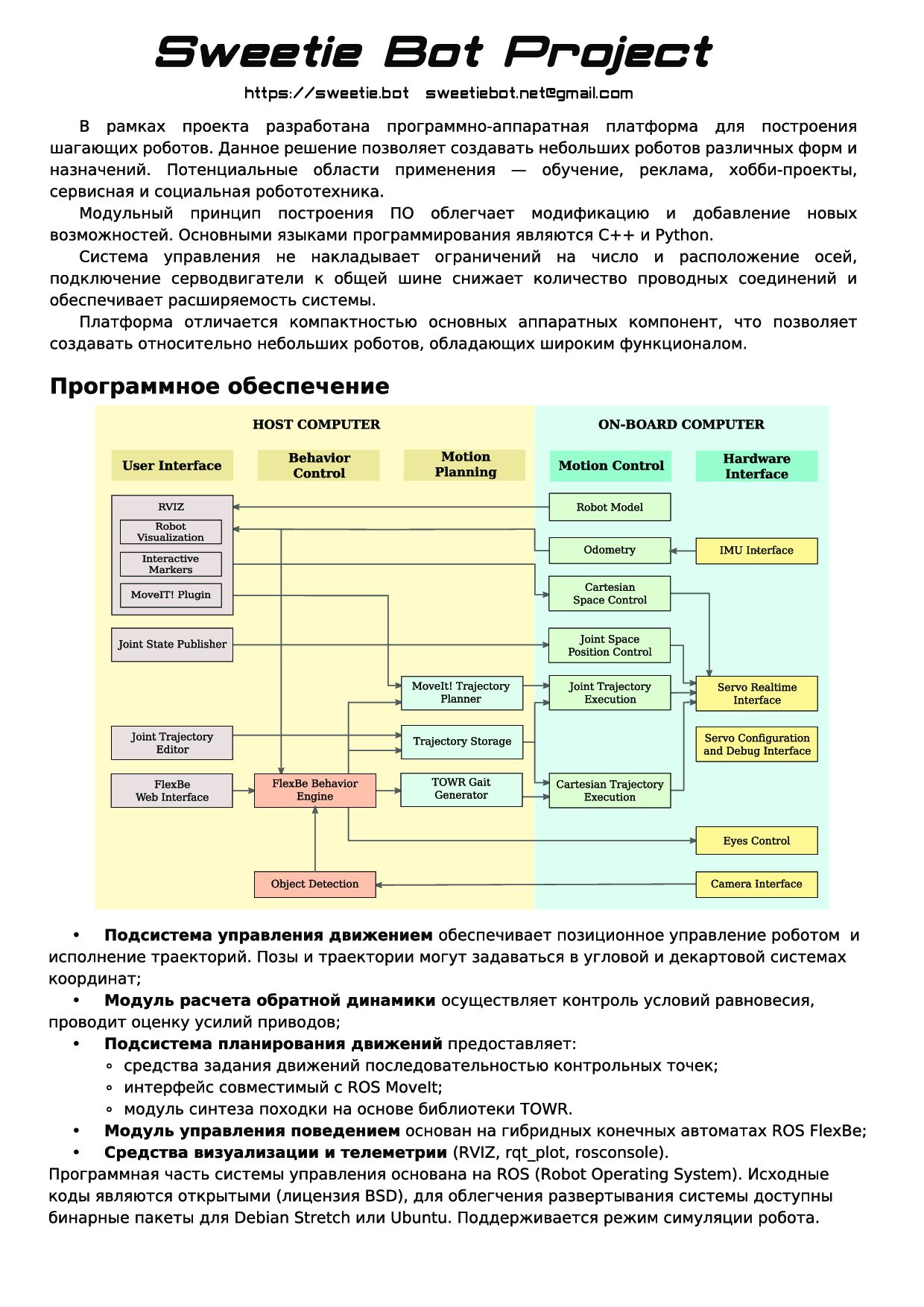
Даже приложуху на андроид наваяли для удобного управления:

Прежде всего спешим сообщить что Proto2 научилась ходить.
На самом деле ходить она умела еще давно. Некоторые даже могут помнить самое первое видео на нашем ютуб канале, но ходьба ходьбе рознь, то был довольно простой алгоритм.
Теперь у нас есть полноценный генератор походки, который может генерировать разные аллюры — шаг, шаг с перекрытием, рысь и даже галоп (его не проверяли, пока страшно :P).
При этом она может разворачиваться на месте и во время ходьбы, ходить боком, по диагонали и т.д.
Несколько анимаций:



Один из первых запусков окончился неожиданно — Свити упала в обморок! О_о
Блок питания не был готов к таким быстрым движениям, были установлены слишком низкие лимиты срабатывания защиты по току. Ничего страшного, поправили, стала ходить нормально.
Еще по началу у нас были проблемы с болтанкой:
Прото3 смотрит с завистью, она ещё пока не может ходить.
Исправилось заменой движков на более мощные.
Планов еще очень много. Будем дорабатывать.
Open Source
Вторая новость наверняка порадует всех, кто захочет пойти по нашему пути.Да, заголовок выше не врет, мы открываем исходные коды проекта под лицензией BSD.
Теперь вы и сами сможете попробовать поуправлять Свити в режиме симуляции.
Исходные коды вместе с краткой инструкцией по установке находятся тут:
https://gitlab.com/sweetie-bot/sweetie_bot
Учтите что для запуска вам потребуется компьютер под управлением Ubutnu 18.04 или Debian Stretch.
И еще одна новость.
Мы решили потихоньку выползать из уютного гнездышка понифэндома. Уже завтра 16 апреля, Проект Свитибот примет участие в форуме Сколково Роботикс 2019! Это первая тематическая робототехническая выставка в которой мы поучаствуем. Обе Свити уже с нетерпением ждут встречи с собратьями!Вчера монтировали стенд.
И дописывали текст для раздаточных материалов.
Спойлер



Даже приложуху на андроид наваяли для удобного управления:
42 комментария
Удачи на выставке! А там же будут «большие» СМИ? О Свити Боте узнает вся страна!
Редизайн. Теперь у нас два сайта sweetiebot.net и второй на козырном домене sweetie.bot.
Обоими некогда заниматься )
СМИ должны быть, поглядим.
В любом случае, успехов на выставке!
skroboforum.sk.ru/price
Да нет, ну какой галоп? Понятно же, что не сможет, и причин тут куча: строение скелета не такое, как нужно для галопа, мощности двигателей наверняка не хватит, а алгоритм не позволит держать равновесие, что при беге намного сложнее, чем при шаге, пластик может не выдержать нагрузку, а провода не дадут продвинуться хоть куда-нибудь.
Вы же видели реально бегающих роботов? Их бег скорее напоминает бег насекомых, потому что он проще, бегать как лошадь роботам ещё пока не дано.
Они чем дальше, тем интереснее могут двигаться. Обожаю наблюдать за этим проектом.
Робот водит прячься ты...
… Это будет слишком неимоверно круто, чтобы быть правдой!
всяческих вам успехов!
Успехов вам в этом грандиозном проекте!
Удачи на выставке :)
Отличное продвижение! Мне, как и сторонним наблюдателям, хочется уже готовый вариант глянуть ) Понимаю, конечно, что не просто всё это. Ох надеюсь у этого бота большое будущее (учёба, работа, достойная зарплата, захват мира) даже за пределами фандома.
Успехов в дальнейшем!
Вам бы еще финансирование как у бостон дайнэмикс.
Понимаю, что много работы. удачи вам